About Me

Hey I'm Ysabelle Lam. I'm a third year undergraduate student at the University of California San Diego pursuing a degree in Aerospace Engineering with a minor in Psychology (a weird combination, I know... but I'm hoping to pursue a career in project management). I currently work for a startup called Treobytes teaching K-12 engineering skills, from how to CAD to building a computer. I also work for TP Engineering Services as a mechanical design consultant that allows me to enhance my technical engineering skills (specifically CAD and assembly analysis).
I went into engineering with a desire to help the world. That dream effects everything I do. My work with Treobytes aims to inspire children who's ethnicity and gender are highly underrepresented in math, science, and engineering majors to pursue a career in STEM. At Project in a Box my projects I work with my team to build and document kits that allow anyone to learn and apply engineering skills. Through my work at UC San Diego's IEEE Student Branch, I help any student at UCSD gain the necessary skills to create any technological device they can imagine. I dedicate much of my time and energy to ensure that my community gains the same learning opportunities I've had.
I went into engineering with a desire to help the world. That dream effects everything I do. My work with Treobytes aims to inspire children who's ethnicity and gender are highly underrepresented in math, science, and engineering majors to pursue a career in STEM. At Project in a Box my projects I work with my team to build and document kits that allow anyone to learn and apply engineering skills. Through my work at UC San Diego's IEEE Student Branch, I help any student at UCSD gain the necessary skills to create any technological device they can imagine. I dedicate much of my time and energy to ensure that my community gains the same learning opportunities I've had.
Projects

FarmDuino:
Overview: The farmduino is a self driving farming system that is designed to bring parts of automated farming to urban population. The farmduino will be composed of a self driving car and water dispenser, to automatically water ones potted plants.Using a RC like car, a retractable watering arm, supersonic sensors, arduinos, and bluetooth signalers the Farmduino should be able to locate where the plant is and disperse the correct amount of water. It will drive to bluetooth markers placed by the user to decide where to water the plants. Users will input the amount of water they wish to be dispnsed depending on the type of crop.
**This project is currently under construction.**
Overview: The farmduino is a self driving farming system that is designed to bring parts of automated farming to urban population. The farmduino will be composed of a self driving car and water dispenser, to automatically water ones potted plants.Using a RC like car, a retractable watering arm, supersonic sensors, arduinos, and bluetooth signalers the Farmduino should be able to locate where the plant is and disperse the correct amount of water. It will drive to bluetooth markers placed by the user to decide where to water the plants. Users will input the amount of water they wish to be dispnsed depending on the type of crop.
**This project is currently under construction.**

Little Bot:
Overview: LittleBot is a K-12 kit that can be bought online to teach kids about arduinos and sensors. What I am doing is expanding the teaching capabilities of this robot by testing alternative control methods, mechanical design improvements, and overall better user experience.
Overview: LittleBot is a K-12 kit that can be bought online to teach kids about arduinos and sensors. What I am doing is expanding the teaching capabilities of this robot by testing alternative control methods, mechanical design improvements, and overall better user experience.
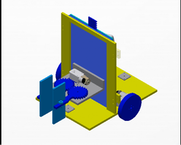
Downsized:
Overview: Our team was tasked to design and build a robot that was capable of moving wooden blocks to elevated platforms. We were given the choice of moving either on a rail above the playing field or a ground vehicle. Ultimately we created a ground, motor driven robot that utilized a claw grasping mechanism and a rack and pinion system to complete the task of transporting the blocks.
Overview: Our team was tasked to design and build a robot that was capable of moving wooden blocks to elevated platforms. We were given the choice of moving either on a rail above the playing field or a ground vehicle. Ultimately we created a ground, motor driven robot that utilized a claw grasping mechanism and a rack and pinion system to complete the task of transporting the blocks.
